
Account
Pictures

Rotary Racer - Car Performance
Castle Combe 2008-06-22
Results
We won !
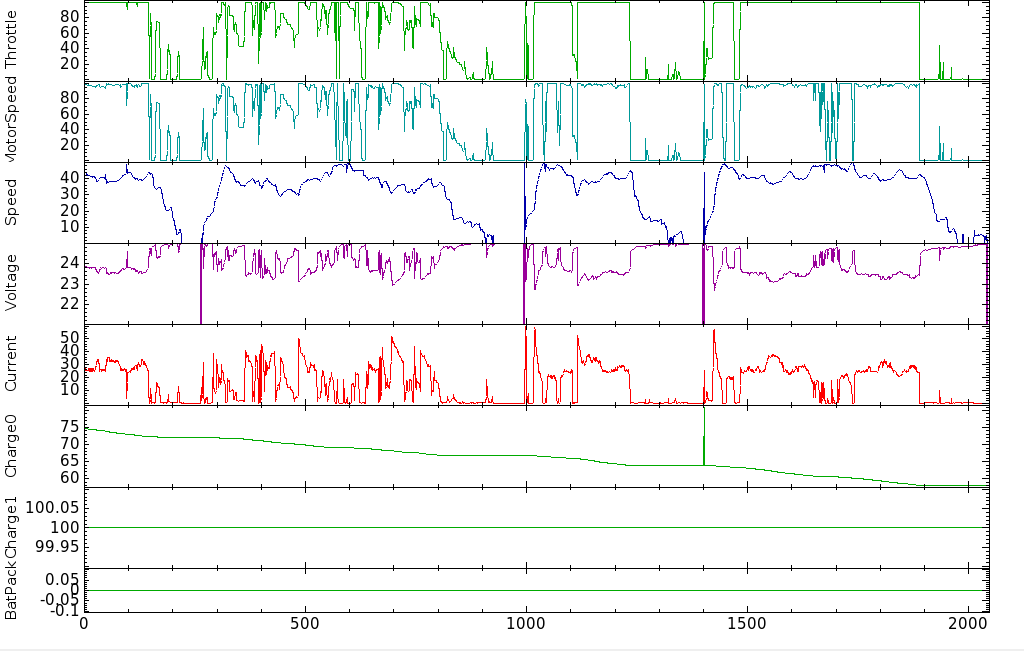
Car Computer Log
This shows the main items measured by the Rotary Racers car computer. They are:
| Item | Description |
|---|---|
| Throttle | The position of the twist grip throttle from 0 to 100% |
| MotorControl | The motor power output setting. The Car computer sets the motor speed based on the drivers throttle position, the speed of the car and the current being used. There is a software algorithm to implement this "drive by wire" system. The Car computer drives the PWM (Pulse Width Modulation) Motor Speed controller with a duty cycle proportional to this value. 0 - 100% |
| Speed | The speed of the car in Km/H calculated from the magnetic read switch pulse generator by the Car Computer. |
| Voltage | The batteries voltage under load. |
| Current | The current being taken from the batteries. |
| Charge0 | The charge left in the battery pack 0. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuassa batteries. It currently bases its results on the current being used from the battery. |
| Charge1 | The charge left in the battery pack 1. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuassa batteries. It currently bases its results on the current being used from the battery. |
| BatPack | The battery pack in use (0 or 1). We have changed the driver with each battery pack change. |
The graphs show the overall data, the actual ASCII data log files are also available, from the links below, for detailed analysis.
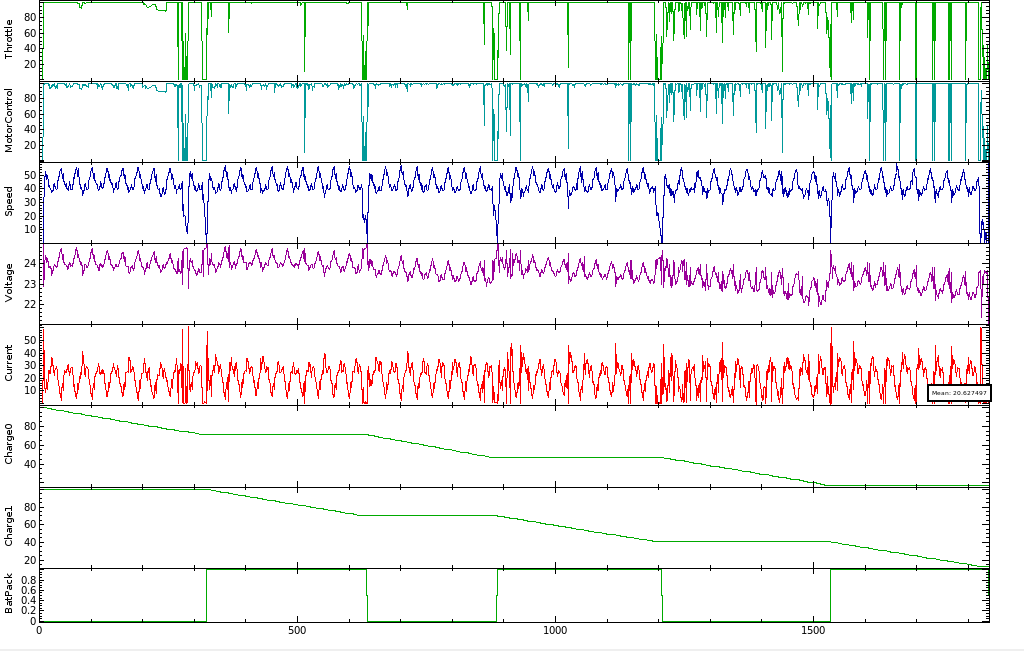
Practice Laps Data
Battery Voltages
These are the battery voltages measured with a multimeter at the end of each change. The readings were taken as soon as posible after the batteries we placed back in the battery area.
| Battery Pack | BatA | BatB |
|---|---|---|
| 0 | 12.40 | 12.41 |
| 1 | 12.46 | 12.47 |
| 0 | 12.16 | 12.26 |
| 1 | 12.20 | 12.21 |
| 0 | 11.80 | 11.90 |
| 1 | 11.96 | 11.98 |
Notes
- The Car Computers "Average Current" setting was 25.50 Amps. The software was car9.
- Castle Combe is a reasonably hilly circuit and there was a lot of wind on the day (40 Km/H ?)
- Drivers were: Dan Isles, Dan Dando, James Alington, Gareth Barnaby, Ben Millar, Alex Ward
- Apart from a small software bug which showed up in practice, the CarComputer and MotorSpeed controller worked fine. The software bug was in the current limiting algorithm. It turned off the power when the speed exceeded 50Km/H, in effect a speed limiter ! You can see this in the practice lap graphs where the motor speed has been reduced even though the throttle is full on and the current is low. We did a small hack to the software to overcome this for the race and uploaded the new software to the car computer. This needs further investigation though.
- The race log clearly shows the CarComputer limiting the current during the upwind/uphill sections to about 95% of power. This is as intended and was instrumental in limiting our battery usage so that they lasted the race. (You can see the small dips in MotorSpeed when the car was using maximum current in the uphill/upwind sections).
- The car computer limited the current to 60 Amps as intended. You can see the 60 Amp spikes when starting off.
- The software hack fixed the motor cutting out at speed. On the downhill stretch with the wind behind we got to a maximum speed of 59.4 Km/H (37.12 MPH). The motor was only drawing 3.02 Amps at this speed, the gearing had clearly limited our speed here. We could have easily got more overall speed out of the car by gearing higher for this section.
- The motor ran cool throughout the race.
- The consistency of the drivers was remarkable. The lads decision to have the heavier drivers go first certainly leveled the speed when the batteries were getting lower.
- The battery voltage at the end of the race was about 11.90 Volts (11.25V under load). From our battery performance tests we had about 10 minutes of reasonable power left in each set of batteries (20 minutes total 8% of total power). This is probably spot on leaving a little bit of power to spare and not letting the batteries get to low where damage would occur. The batteries were much better matched, probably due to better charging and the small offset in lap counts we did between the battery packs to offset this issue.
- The battery charge level calculations are not far off. They appear to read slightly high so we will adjust them based on this result.
- You can see the increased current taken going up the hill/into the wind and the less current on the downward stretch. The Car used about 37 Amps going up hill into the wind and about 6 Amps on the downhill/downwind section.
- There were no data glitches or computer dropouts at all.
- We were averaging close to 21 Amps but this was going from 5 to 32Amps with the wind/hills. We could have geared the car slightly higher even without computer control. The aerodynamics improvements made a significant difference from previous results. Even taking into account the wind on the day we were going faster than at Goodwood. At Goodwood we were averaging about 43Km/H. At Castle Combe we were averaging around 44 Km/H even with the wind (The wind produces extra aerodynamic drag proportional to the square of velocity.). The Virtual Wind Tunnel experimentation, the testing of the proposed changes at Kemble Airfield and the work done on the car to implement these changes (Smaller roll-bar, Airfoils on roll-bar and axles, covering underside of car, gaffer taping edges and the windscreen gave us extra speed. The drivers excellent consistent driving and superb pit stop team work (31 seconds to change driver, change batteries and check car !) together with the Car Computers power management and cars better aerodynamics won the race for us.
- Improvements: The Car Computer and Motor Speed Controller have now proved them selves. I think we can now try gearing the car a bit lower and give the motor speed controller more control over the cars speed. The will lower the efficiency a little (perhaps 2%) but would allow us to go faster, where appropriate, to improve overall lap speed. (Also the Turbo button would work Dan !). Obviously the aerodynamics can also be further improved.