
Account
Pictures

Tracking the PCB for the new speed controller
Rotary Racer - Car Performance
Filton Kar Kapers 2008-07-19
Results
We won 5 out of the 6 heat races, coming second in the other. In the final race we came third. We also won the fastest race award.
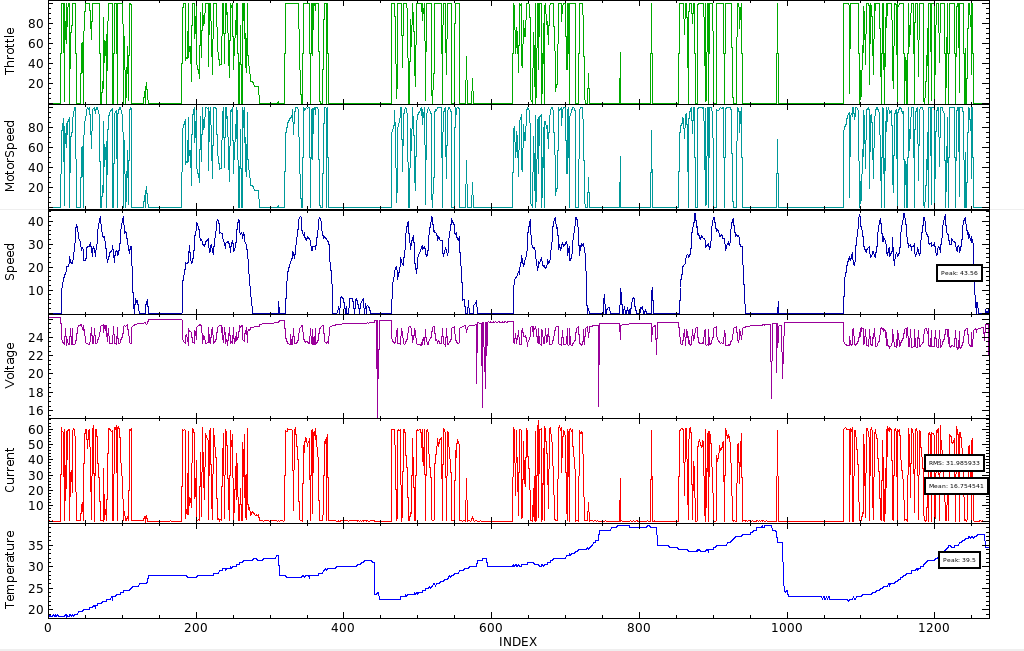
Car Computer Log
This shows the main items measured by the Rotary Racers car computer. They are:
| Item | Description |
|---|---|
| Throttle | The position of the twist grip throttle from 0 to 100% |
| MotorSpeed | The motor power output setting. The Car computer sets the motor speed based on the drivers throttle position, the speed of the car and the current being used. There is a software algorithm to implement this "drive by wire" system. The Car computer drives the PWM (Pulse Width Modulation) Motor Speed controller with a duty cycle proportional to this value. 0 - 100% |
| Speed | The speed of the car in Km/H calculated from the magnetic read switch pulse generator by the Car Computer. |
| Voltage | The batteries voltage under load. |
| Current | The current being taken from the batteries. |
| Charge0 | The charge left in the battery pack 0. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuassa batteries. It currently bases its results on the current being used from the battery. |
| Charge1 | The charge left in the battery pack 1. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuassa batteries. It currently bases its results on the current being used from the battery. |
| BatPack | The battery pack in use (0 or 1). We have changed the driver with each battery pack change. |
| Temperature | The Temperature of the motors casing in degrees C. |
The graphs show the overall data, the actual ASCII data log files are also available, from the links below, for detailed analysis.
Notes
- The Car Computers "Average Current" setting was 25.00 Amps. The software was car10.
- We used the old RR1 motor, which has a shorted turn and the old Varta batteries.
- The Filton circuit was on a car pack and was short, twisty and bumpy. There were few passing opportunities. The circuit had quite a hill into the wind and there was quite a lot of wind on the day (30 Km/H ?)
- Drivers were: Dan Isles, Ben Millar, Gareth Barnaby, James Alington, Dan Dando, Gareth Barnaby, Dan Isles.
- The CarComputer and MotorSpeed controller worked fine. The SDCARD logged the data Ok and the temperature sensor appears to work fine. There were a few glitches in the data downloaded, but this could be due to me playing with higher baud rates for downloading the data to the PC.
- The Temperature sensor worked fine. It shows the motor slowly heating up through a race. We should be able to estimate the internal thermal resistance of the motor (how well the motor can get heat away from the armature) using the voltage/average current for a race and the rate of rise of the motor case temperature with this data, although this is for the motor with the shorted turn.
- Due to the short twisty circuit the car never got up to its full speed. The drivers got up to 43.56 Km/H on the downwind/downhill section, which is quite fast for this tight circuit. It must have been scary coming up to the chicane !
- The car handled quite well considering the bumpy twisty circuit. The car showed no tendency to roll. It did slide a bit on the sharp corners and on the gravel, but this was mainly a backend or an overall slide. There was no tendency for the front end to slide, which is good. Using the wider tyres would probably been better for this race giving better grip and a bit of suspension, although we probably would have had to increase the gearing for this.
- The drivers drove excellently again. They had a lot more experience of taking the car near the limits in this race. They were a bit frustrated with trying to get past some of the cars in the race on the twisty circuit, but they showed patience waiting for the right moment and despite some "interesting" slides the car suffered no damage whatsoever. Less work for next Tuesday night !
- The race log clearly shows the CarComputer limiting the current during the upwind/uphill sections to 60 Amps as intended.
- Due to the tight circuit and lots of traffic, the car was almost always being limited by the 60 Amp current limiter on the uphill sections. At start off this was limiting our power to about 70% and at the first corner it was still limiting to about 87%. At the start of the downhill sections it was limiting to about 90%. When the car got out of traffic and up to speed it was only limiting to a degree, but in the traffic it made acceleration difficult. Obviously the current limiter is designed to protect the motor, batteries and motor speed controller and in the context of a normal Greenpower race its current limiting function does not have a real detrimental effect. However, for these tight and twisty circuits it may be worth making the current limit programmable so we could use an increased current limit, say 80 Amps. We could use old motors and batteries to protect our main race motor and batteries when using this increased current limit.