
Account
Pictures

Showing the display board to a guest
Rotary Racer - Car Performance
Goodwood 2010-06-20
Results
This was the first F24 Greenpower event of the season for us with Rotary Racer RR8d. The drivers decided to use 6 drivers in the race. With the higher than expected speed limits set by Greenpower in the Coorporate Challenge we decided to look at improving the aerodynamics of the car to increase the cars efficiency so we could go for a Platinum mileage award.. We measured and experimented with reducing the cars rolling resistance, but could only find a slight improvement from this. Gareth and Dan measured the car and Gareth entered a more accurate CAD model in Pro/Engineer. We then tried this model in the VWT and played around with a few ideas. One idea was to pull in the rear end more after Gareth had talks with Bloodhounds aerodynamisist. The VWT indicated that the two best improvements would give us about a 10% reduction in drag, equivelent to about a 5% improvement in speed. The team implemented these relatively minor changes to the car for this race. We had a plan to try and achieve a platinum millage award at this race. It worked ! We went about 4.2% faster in slightly higher wind conditions and at about the same current as we used in the CC a couple of monts ago. We managed to win the race and achieve 127.2 miles in 4 hours giving us our first platinum award.
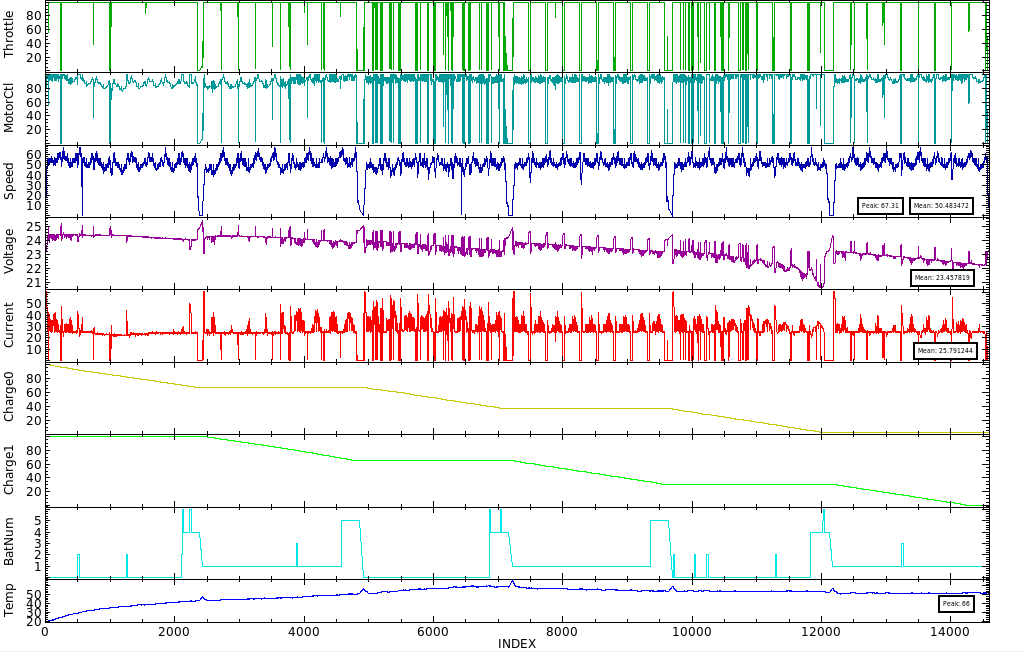
Car Computer Log
This shows the main items measured by the Rotary Racers car computer. They are:
| Item | Description |
|---|---|
| Throttle | The position of the twist grip throttle from 0 to 100% |
| MotorCtl | The motor power output setting. The Car computer sets the motor power based on the drivers throttle position, the speed of the car and the current being used. There is a software algorithm to implement this "drive by wire" system. The Car computer drives the PWM (Pulse Width Modulation) Motor Speed controller with a duty cycle proportional to this value. 0 - 100% |
| Speed | The speed of the car in Km/H calculated from the magnetic read switch pulse generator by the Car Computer. |
| Voltage | The batteries voltage under load. |
| Current | The current being taken from the batteries. |
| Charge0 | The charge left in the battery pack 0. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuasa batteries. It currently bases its results on the current being used from the battery. |
| Charge1 | The charge left in the battery pack 1. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuasa batteries. It currently bases its results on the current being used from the battery. |
| BatPack | The battery pack in use (0 or 1), the turbo button (2) and the Pitstop warning (4) . We generally change the battery pack with each driver change. |
| Temp | The Temperature of the motors casing in degrees C. |
| GPS | GPS position, speed and time together with lap position information |
| Misc | Other itmes describing the operation of the control system |
The graphs show the overall data, the actual ASCII data log files are also available, from the links below, for detailed analysis.
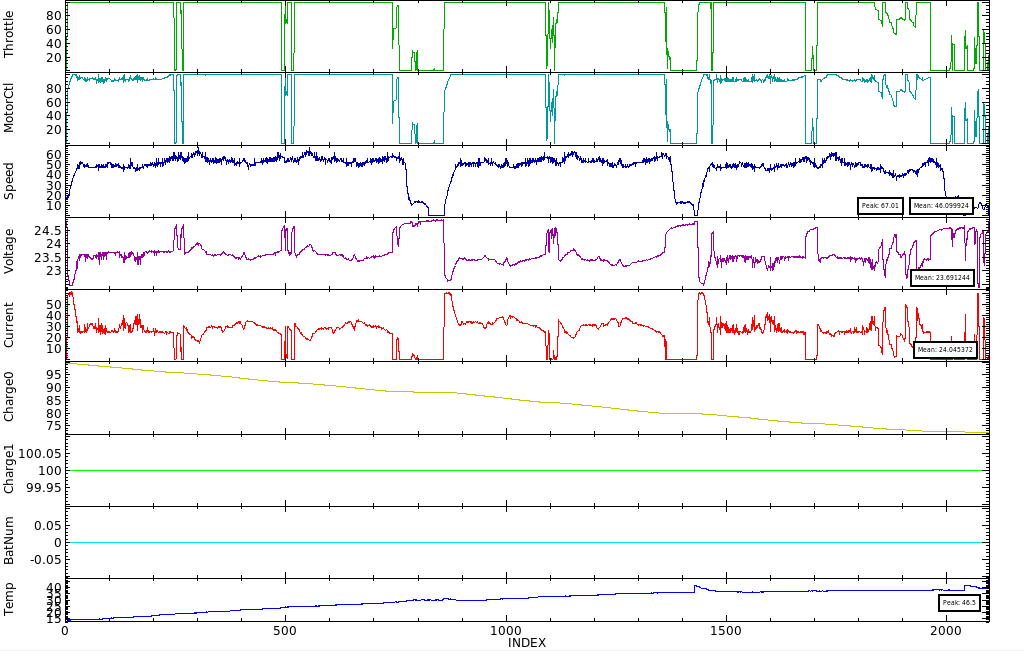
Practice Laps Data
Battery Voltages
These are the battery voltages measured with a multimeter at the end of each change. The readings were taken as soon as possible after the batteries were taken out of the car and placed back in the battery area. The batteries are very well balanced and we used each pack revalively equally.
| Battery Pack | BatA | BatB |
|---|---|---|
| 0 (RR12,RR15) | 12.51 | 12.51 |
| 1 (RR13, RR14) | 12.43 | 12.43 |
| 0 | 12.17 | 12.20 |
| 1 | 12.14 | 12.13 |
| 0 | 11.80 | 11.82 |
| 1 | 11.86 | 11.85 |
Notes
- The Car was RR8d. This was the cars sixth race. Aerodynamic modifications to the rear end, screen, and driver cockpit sides had been done. A second hand GPS module had been added and the software updated to log the information and record timing line crossings. The batteries were kept in insulated and warmed (about 42 degrees C) battery boxes.
- After practice with a 19:49 ratio, the car was going so well we decided to experiment with a 20:49 (2.45) ratio on the chain drive giving the ability for more speed with increased control range for the speed controller at the expense of a degree of efficiency.
- The Goodwood circuit is 3.862Km long and is fairly flat with sweeping corners. There was a reasonable wind on the day (25 Km/H ?).
- The software was car17 which included average speed computation and GPS data and lap timing measurements. The Car electronics worked well and the software changes worked well. The speed measurement was a bit variable and needs a look at. The current control was bouncing up and down a bit because of this.
- The Car Computers "Average Current" setting was at first 25.00 Amps, the Control Speed was 48 Km/Hour, this was tweaked during the race to keep our race speed below the limits for this race.
- In general the new GPS timing system worked well giving us a second set of lap timing figures to make sure we were near but under the speed limits for this race. Unfortunately the GPS dropped out for about 25% of the time. We suspect the aerial position, being close to the steel rollbar, caused this. We will try moving the aerial. The GPS lap position and timing system worked well, but the data was not stored to the SDCARD. We need to add this.
- Drivers were: Ben Millar, Liam Towills, Dan Dando, Tom Allington, Gareth Barnaby and James Allington. The drivers drove excellently and the drivers performance was well matched. Pit stops were good.
- The car ran very well and the software performed well. The motors temperature was generally around 50 degrees but did go up to 60 degrees. We could look at the motor cooling.
- The batteries performance was a little disapointing considering the warming. They may be degrading faster than expected.
- We had a excellent stable race, came first and achieved our goal of getting a Platinum mileage award :)