
Account
Pictures

The F24 start
Rotary Racer - Car Performance
Merryfield 2011-09-17
Results
An excellent race. The weather was on/off, quite windy (30 km/h ?) and there were rain showers. The car was RR8g. No modifications since Dunsfold except some fixes to improve watter ingress (which were worthwile this race !).
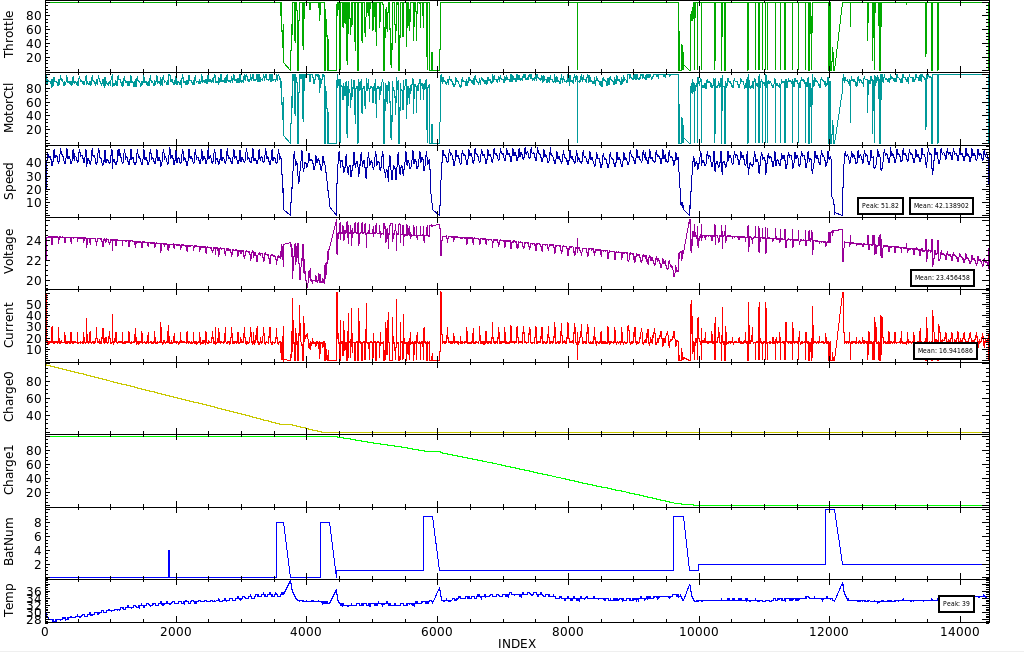
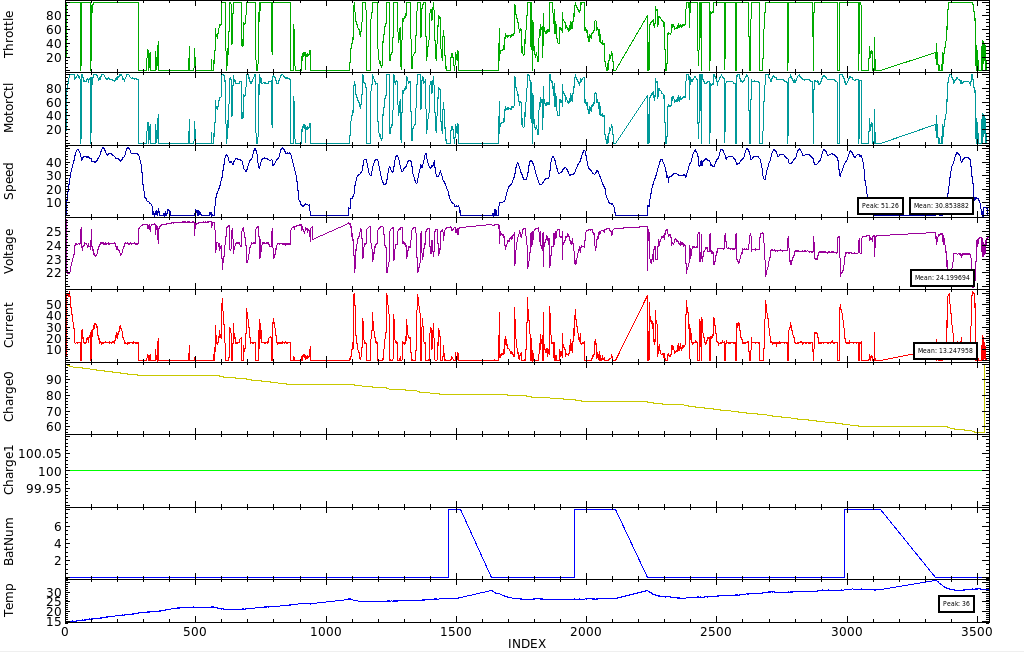
Car Computer Log
This shows the main items measured by the Rotary Racers car computer. They are:
| Item | Description |
|---|---|
| Throttle | The position of the twist grip throttle from 0 to 100% |
| MotorCtl | The motor power output setting. The Car computer sets the motor power based on the drivers throttle position, the speed of the car and the current being used. There is a software algorithm to implement this "drive by wire" system. The Car computer drives the PWM (Pulse Width Modulation) Motor Speed controller with a duty cycle proportional to this value. 0 - 100% |
| Speed | The speed of the car in Km/H calculated from the magnetic read switch pulse generator by the Car Computer. |
| Voltage | The batteries voltage under load. |
| Current | The current being taken from the batteries. |
| Charge0 | The charge left in the battery pack 0. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuasa batteries. It currently bases its results on the current being used from the battery. |
| Charge1 | The charge left in the battery pack 1. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuasa batteries. It currently bases its results on the current being used from the battery. |
| Charge2 | The charge left in the battery pack 2. This is calculated by the car computer using an algorithm that has been honed to match the battery discharge curves for the Yuasa batteries. It currently bases its results on the current being used from the battery. |
| BatPack | The battery pack in use (0, 1 or 2), the turbo button (4) and the Pitstop warning (8) . We generally change the battery pack with each driver change. |
| Temp | The Temperature of the motors casing in degrees C. |
| GPS | GPS position, speed and time together with lap position information |
| Misc | Other items describing the operation of the control system |
The graphs show the overall data, the actual ASCII data log files are also available, from the links below, for detailed analysis.
Practice Laps Data
Notes
- The Car was RR8g. This was the cars forteenth race.
- We used a 17:49 gear ratio.
- The Merryfield circuit is about 1.094Km long and has some slight hills with three tightish corners. It is a bit bumpy in places. There was a reasonable wind on the day (30Km/H ?).
- The software was car23. The Car electronics worked well, but there were the occasional watchdog reboots when communications were lost in the dip.
- The battery charge calculations worked well and the Voltage based charge measurement was usefull this race.
- The Car Computers "Average Current" setting was 16.00 Amps, the Control Speed was about 40 Km/Hour, this was tweaked during the race based on actual average lap current keeping it to around 17Amps.
- Drivers were: Ben Millar, Louise Barnaby, Stepanie Dando, Gareth Barnaby, Tom Allington and Dawn Barnaby. The drivers drove excellently, went fast and kept out of trouble.
- The motors temperature kept below 35 degrees, the reduced average current has reduced this.
- There was an issue with the first battery pack (0 RR1,RR2). During Louises drive, the batteries failed earlier than expected. The logs show that one cell collapsed (2V jump in voltage). The Voltage charge indicator showed a lower than expected voltage right from the start, so was quite useful. This battery pack also gave poor performance during Dunsfold. It was used for the winter battery testing and has been taken a bit low in previous races and so is possibly damaged.
- We played safe with the other two battery sets to make sure and we had about 20% left in the last set at the end of the race.
- An excellent race an a superb 1st place result with 100miles.