
Account
Pictures

Louise happy after her first drive in a race
Chipping Sodbury's Rotary Racer 7
Design and Development - 2007 - 2008

Introduction
The Rotary Racer 7 is the current car produced by Chipping Sodbury School's Rotary Racer Greenpower team. The team has been entering Greenpower races form many years, although the team members have changed as older pupils leave the school and new pupils and parents join the team.
Management
Cars Design
The Rotary Racer 7 car's design was started in October 2006. There where a lot of new members in the team and it was thought best to create a new car from scratch rather than develop the existing car. The main reason for this was to allow the pupils and parents to experience all of the processes in order to design, build and race a Greenpower car.
The existing Rotary Racer car had been very successful, winning a number of races and coming 8th in the national championship. So we had quite a challenge if we wanted to produce a better car! We had a lot of experience of Greenpower racing from the older team members and other teams within the school all of which which helped in shaping the teams ideas. We had a number of design meetings, quite boring for the pupils !, to try and get our ideas in order. Some of our original ideas were:
- Use the existing cars construction technique as we knew this method and had a supply of aluminum tube from a sponsor. We could also use the wheels and steering mechanism from the existing car.
- Improve the battery loading system as this was awkward in the old car and our pit-stops were taking about 3 minutes mainly due to this.
- Add electronic instrumentation. We had no instrumentation on the car and so it was a bit hit and miss as to the gearing to use for a race and we had no information, except by actually racing, on how well the car was going.
- The original car had a fixed gear, which worked well but did not have the ability to get the maximum from the batteries during a race. We decided to have a go at using computer controlled electronic speed control for this rather than gearing as we had a parent who was an electronic engineer and wanted to have a go at this. We left our options open so we could use gearing if this did not work out.
- We knew the main issue with Greenpower cars is the aerodynamics, and so we decided to try and use a wind tunnel with a number of models. The new cars design was to be lower and thinner.
Chassis design
We managed to get some time in the wind tunnel at the University of the West of England. So a number of model car designs were made by pupils and parents out of foam to test in the wind tunnel. We tested many things including how much drag our external motor had as well as the steering tubes etc. After looking at the results of this, and considering the ease of producing the design we choose one to build.
The cars chassis was built in a similar manner to the previous cars. It was made using a space frame made from 25mm x 1.6mm aluminum tube connected using plastic bungs with aluminum triangular plates used to strengthen some corners. This is the same basic method as used in the standard Goblin Greenpower cars. . It is relatively easy for the pupils and parents to do. The cars base was made using 6mm plywood with an additional layer of 6mm plywood at strategic points. The car was covered with 1.6mm ply and Boatcoat. Boatcoat is a plastic film designed to cover yachts for transport. It is stuck on with double sided tape and gaffer tape and then shrunk using hot air paint stripper guns. This construction technique produces quite a light car which is good for low rolling resistance. The cars weight is about 48 Kg. With batteries and driver the all up weight is about: 125 Kg, depending on how many bacon baps the driver has had !
The nose code was made of layered foam and sculpted by the boys and dads to create a suitable aerodynamic shape.
The steering assembly was taken from the old car. It consists of two cycle head sets welded to a cross tube.
The wheels were taken from the old car. They are 20inch cycle wheels made up for us at the local cycle shop, Terrys Cycles. The wheels are filled in with thin ply and use good quality Hope hubs. We use thin, high pressure tyres installed to give low rolling resistance and low aerodynamic drag.
The rear axle was going to be a simple aluminum bar as per the existing car. Unfortunately, later in the cars development, we noticed the car was very nose light now that the batteries were further back. We had not considered the center of gravity very well ! So we made up a rear sub-frame from MIG welded steel square tubing to allow us to use stub axles further back and either side of the batteries. This allowed us to keep our idea of loading the batteries on from the rear.
The battery installation system is quite unique! It is a bit like a roll-on roll-off ferry. The back of the car hinges upwards and allows the set of two batteries to be easily slid out and in. Kitchen door hinges were modified for this purpose. A single plug and socket is used to connect the batteries for ease and speed. The battery packs were made of two batteries connected using a piece of ply and packing tape. This rear battery loading system certainly helped our pit stops. The lads had them down to 31 seconds at Castle Combe !
The motor is simply mounted in the airflow on top of the car behind the driver for effective cooling and employs a simple fixed gear chain drive to a single wheel.
Cars Electronics
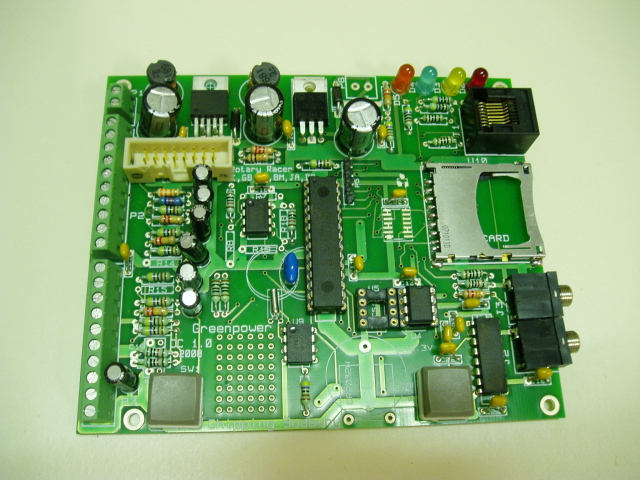
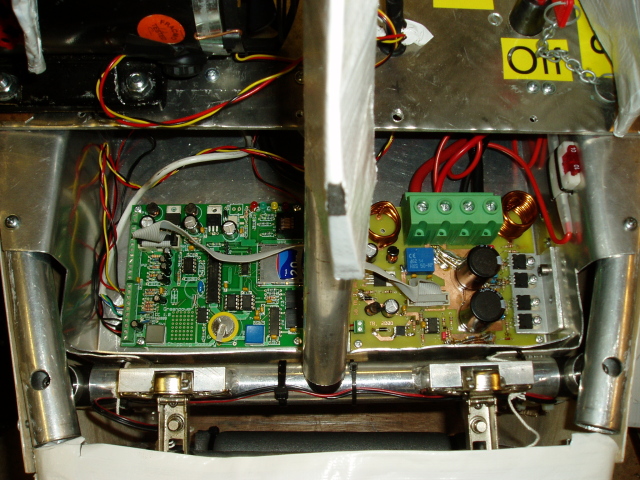
The old car had no electronics, just a simple on/off switch. Rotary Racer 7 however, has a Car Computer and Electronic Speed control. The Car Computer was developed by a parent with the pupils helping. A prototype design was built using the standard PicAxe computer modules that the school used for teaching purposes. The idea of this was to make the system so that the pupils could use the module in the future. After trialling the system in some races, it was decided to actually design a board with all of the components we needed to simplify the overall system and make it more reliable. A 2 layer PCB was designed, the lads did some of the PCB tracking, and sent to a PCB company for manufacture. A number of boards were made for the teams at Chipping Sodbury School. The Lads and Lasses of the teams made up the boards. A separate Motor Speed controller was designed and built to be driven from the Car Computer. This employs high current MOSFET transistors as the PWM (Pulse Width Modulation) output. The design for this was challenging as the motor could draw up to 130 Amps. The PCB for this was made in the school using the schools PCB fabrication facilities.
The software and electronics are being continually updated but the current system performs the following functions on the car:
- Measures the cars speed and distance using a simple cycle magnetic reed switch on one of the wheels.
- Measures the battery voltage.
- Measures the battery current.
- Measures the motor temperature.
- Has a throttle input for a twist grip throttle.
- Has a battery pack number sensor. This uses extra pins on the battery plug and socket.
- Has a, battery backed up, real-time clock for the date and time.
- Logs all of the data to EEPROM or a removable 2GByte SDCARD which can store a years worth of data.
- Has a 16x2 line LCD display for driver information.
- Has three LED's for driver information
- Has four push button switches to modify the operation or see different data.
- Has two RS232 links that can be used to connect to a computer for control and downloading of information. These can also be used in the future for telemetry and/or GPS devices.
- Generates the control PWM signals for the Motor Speed Controller
- Generates the control PWM signals for the motor cooling fan.
- Calculates the charge left in each battery pack.
- Protects batteries and motor from large start up currents. The current is limited to 60 Amps by the current limiter.
- Manages the motor speed based on throttle position, current being used and battery charge levels. This is a fly by computer car !
- Provides warnings on low voltage and can reduce power when this occurs to protect the batteries.
- Turbo function to provide limited amounts of full power.
We are using the CarComputer/MotorSpeed controller combination instead of having a gear change mechanism to keep the car running at optimum speed for a race. We over gear the car a bit, by choosing a suitable fixed gear ratio and then let the Car Computer manage the motor speed to keep the current averaging at the 25 Amp level. The idea is to gear the car so that the motor speed controller runs the motor at about 90% of full voltage normally. This provides a +-10% power range. In effect this provides a similar ability to having a continuously variable gearbox over a 20% gearing range. This is quite suitable for the nature of a Greenpower car.
The electronics have been designed for efficiency. The total power consumption of the Car Computer, Display and Motor Speed Controller is: 0.48 Watts which is about 0.08% of the total Greenpower Car's power consumption. As a comparison the power consumption of the solenoid we used to use to switch the motor on with was: 9.6 Watts, about 1.6% of total power !
The electronic speed control when switched fully on is about: 98.88% efficient. When operating at 90% voltage level its efficiency drops to about: 97.5% (Needs accurate testing ...). When geared and controlled like this the motors efficiency also drops a little, by about 1%. This compares very favourably with chain drives (about 97%) and gearboxes (could be as low as 90% depending on design, a good one is about 94% efficient).
So far the car electronics is working well. We haven't had the motor speed controller blow up yet, apart from a prototype unit which did go up in flames ! We do have a backup solenoid, just in case.
The data logging has proved to be invaluable for us to know how well the car is doing. We have used this as a tool to measure incremental performance gains as we try and improve the cars performance. Some info on the data logs is here.
Aerodynamics
In the first race the cars performance was slightly disappointing. It did well, for its first race, but by our lap time measurements it was slightly slower than our old car. So we focused on the aerodynamics. We setup and used Open Source CFD (Computational Fluid Dynamics) software to create a simple virtual wind tunnel where we could try out 3D CAD models of the car. With this we tried a few modifications including a windscreen, thinner roll-bar, aerofoils on parts and covering the cars underside. Each of these gave a small improvement in the VWT. We then tried mock ups of these changes on the car and tested them at Kemble Airfield. The results there seemed to concur with the VWT so we set about doing the real modifications to the car. In the following race the car won, and was lapping faster than we had ever done even with a 40Km/H window blowing ! We managed to do 105.45 miles which gets us a Gold award for the car. This is equivalent to doing about 1500mpg in a petrol car.Sponsors
The cars design and development was solely funded by our sponsors either financially or by giving us materials to use. The cost of building this car was about £1100.00 including the drive batteries and motor but using the wheels and steering system from our old car. Our main sponsors are:- Rotary Club Chipping Sodbury (funds)
- PB - Parsons Brinckerhoff (funds)
- Durbin Metals (Funds, Metal)
- BLD ltd (Helmets and gloves)
- CTEK (Battery Chargers)
- Shipp Engineering, Chipping Sodbury (Metal)
- Boat Coat (Car covering material)
- Kemble Air Services (Car testing on airfield)
- UWE (Wind Tunnel)
- Terrys Cycles (tyres/tubes discount)
Further Development
We are now developing the car further, changing little things to try and improve the performance and get the boys to fit as they grow ! Things we intend to work on are:- Telemetry to the pits so we can see how well the car is running during a race.
- Putting the motor inside the car and cooling it well to improve aerodynamics.
- Improving the aerodynamics in general.
- Playing around with different fixed gear ratios.
- Improving the car computers battery charge calculations.
- Improving the car computers motor management algorithms.